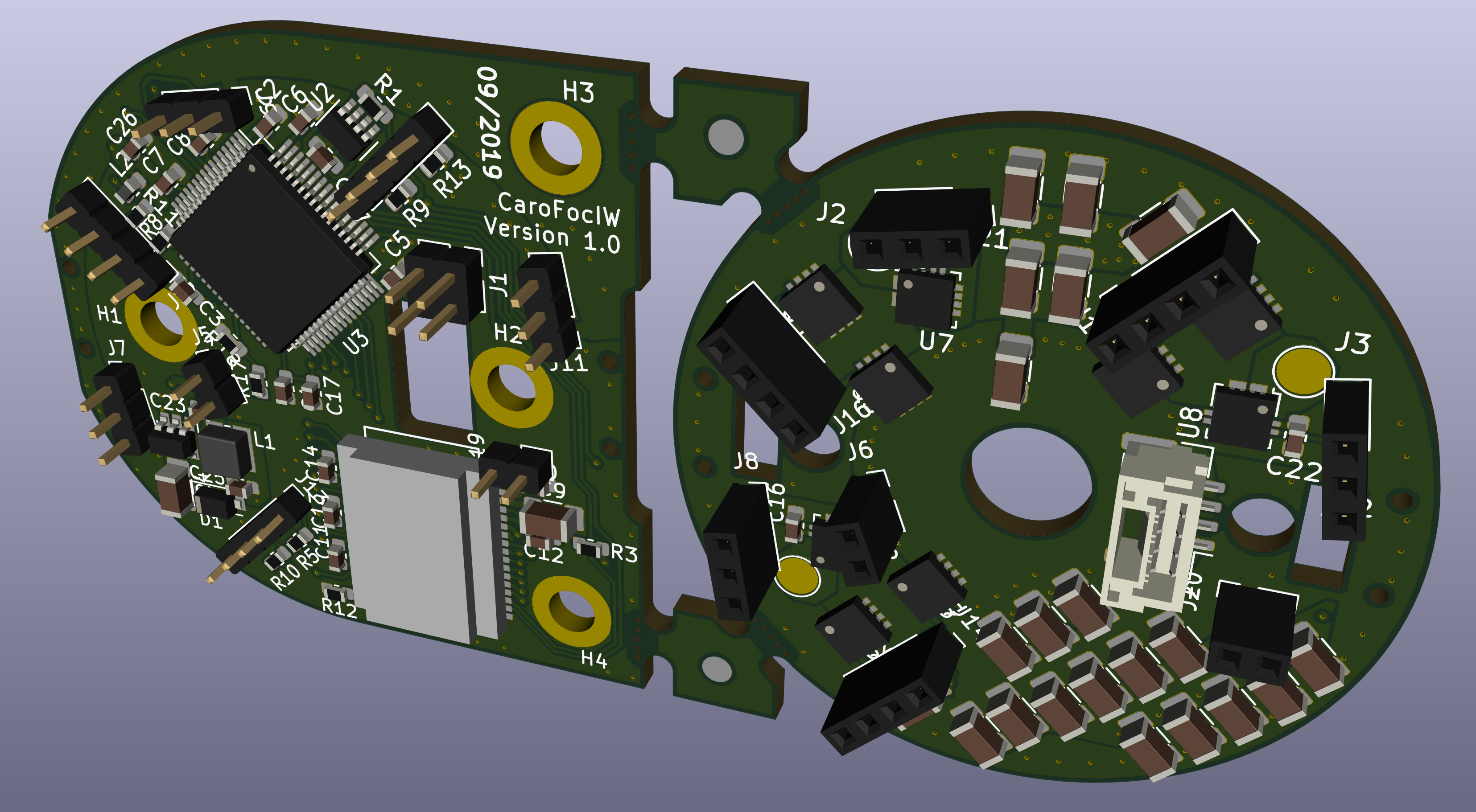
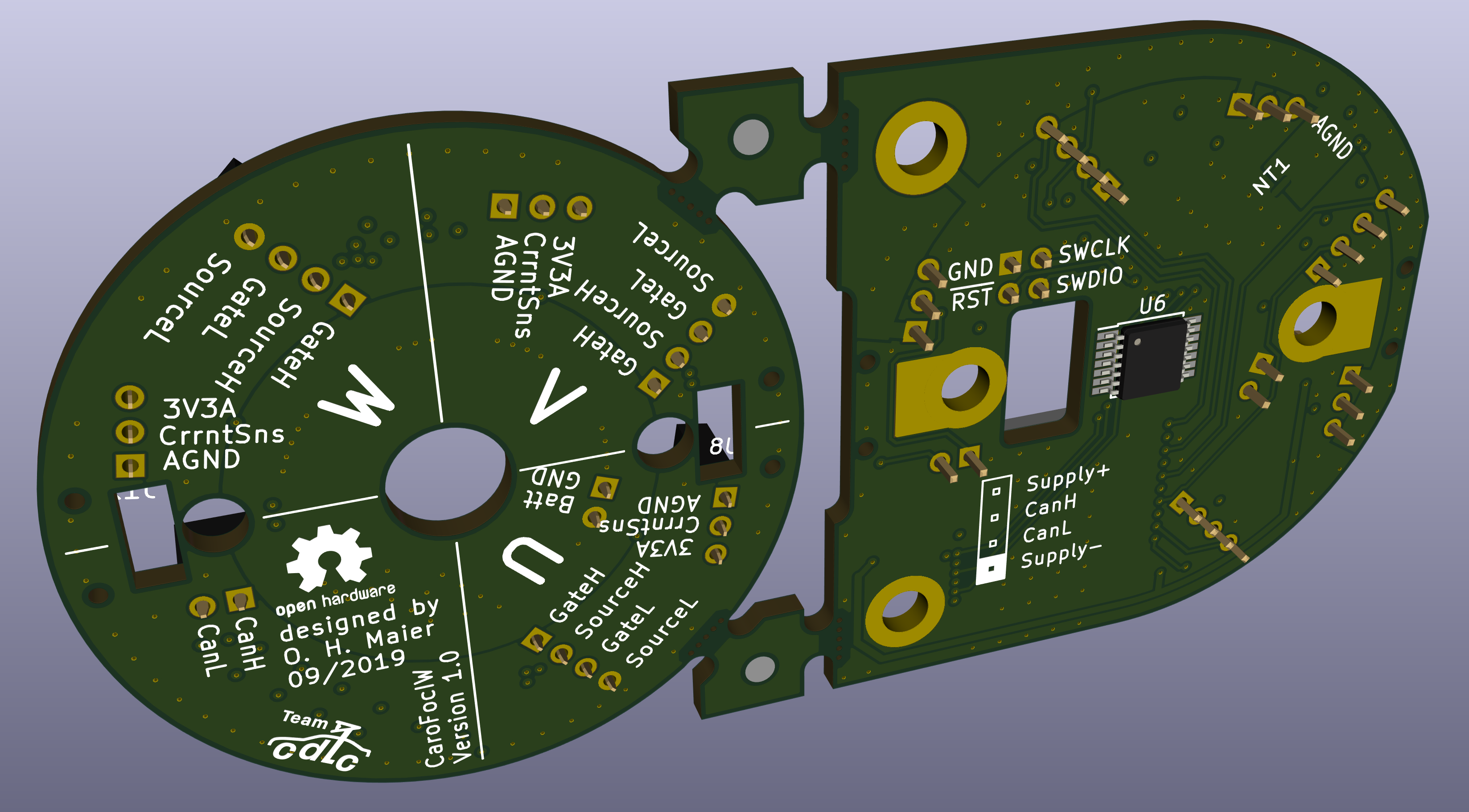
A small form factor servo inverter for BLDC motors to be mounted directly to the back of the corresponding motor. Intended use in the autonomous 1:10 scale vehicle Carolinchen XI of the Team CDLC (https://www.team-cdlc.de/, german). Firmware compatible with VESC and the custom firmware of the previous iteration. This repository only contains the hardware design.
- Field oriented control with sine commutation
- 3× in phase current measurement with oversampling
- 14bit position encoder
- 16kHz sampling rate and PWM frequency
- JST-GH connector with supply and CAN bus interface
| Function | used part |
|---|---|
| Microcontroller | STM32F405RGT6 |
| Gate Driver | TLE7185-1E |
| Current Sensors | 3× ACS71240KEXBLT-010B3 |
| Encoder | AS5048A |
| CAN Transceiver | TCAN332 |
| Voltage Regulator | LMR16006YQ3 |
| Power MOSFETs | 6× BSZ013NE2LS5I |
- Schematics finished
- Layout finished
- PCB fabricated
- PCB assembled
- Mechanical assembly finished
- Basic functional tests done
- Microcontroller working
- Gate driver working
- Current sensors working
- CAN interface working
- DC link voltage measurement working
- Angle encoder working
- Fully operational
- Tested on vehicle
- Long term real world testing
Link to Schematics
Link to Interactive BOM